高知工科大学が挑む農業のスマート化
2022年12月17日に高知工科大学IoP推進センター研究成果報告会が、高知工科大学永国寺キャンパスで開催されました。高知工科大学は、産学官連携のIoPプロジェクトに参画し研究を行っています。報告会では研究者がスライドを使って成果を紹介しました。

最初に、高知工科大学学長特別補佐(IoP・新学群担当)IoP推進センター長の清水明宏氏から主催者挨拶がありました。
「国の支援をいただきながら、2018年から5年間進めてきたIoPプロジェクトの研究の成果報告になります。キャンパスに隣接する施設園芸ハウスを建築し、県内のフィールドでも色々な実験を行ってきました。工科大には、農学部がありませんが、農業のフィールドでAIやデータサイエンス、ネットワーク分野の知識を駆使し、次の農業の世代に貢献するために取組みました。ICTや機械工学に留まらず経済や経営の分野の学びも活かして進めてきた研究を御覧ください」


森林バイオマス資源を活用した脱化石燃料型の施設園芸農業モデル
古沢浩(環境理工学群/地域連携機構 教授)
古沢教授からは、施設園芸における小型バイオマス発電機の実証実験について、どこまで達成したのか、事業化に必要なことなどが語られました。
「工科大学の施設園芸ハウスに、当時、日本で2台目となる新型小型バイオマス発電機を導入し、環境制御型施設園芸ハウスの実証実験を行っています。発電機は、通常のガスエンジンタイプよりも複雑で、木を可燃性のガスにして、その燃焼によりエンジンを回しています。2020年からの運用の総括ですが、FIT(固定価格買取制度)を利用した想定で、年商1,200から1,600万円が、四国の木を使って可能です。
今回の実証では、この発電機は50kWでの運用でしたが、乾燥チップのサプライチェーンができれば90kWが安定して供給可能となり、1反以上2反未満のハウスの冷暖房に使えることが分かりました。生産実績としては排熱冷房によりキュウリを8月末に、高糖度トマトを10月中旬に早期出荷を行いました。
今回の実証は民間で行うにはリスクが高い取り組みであり、社会実装に向けて大学がファーストペンギンとして担う部分と考え、技術を社会と繋いでいく使命感を持ちながら行いました。」

データの有効な利活用のための安全・安心な情報通信ネットワーク
福本昌弘(情報学群 教授)
福本教授からは、データをどのように集めてIoPに活かすのか、安全・安心なネットワークについての話がありました。その後、研究グループの企業2社の担当者から報告がありましした。
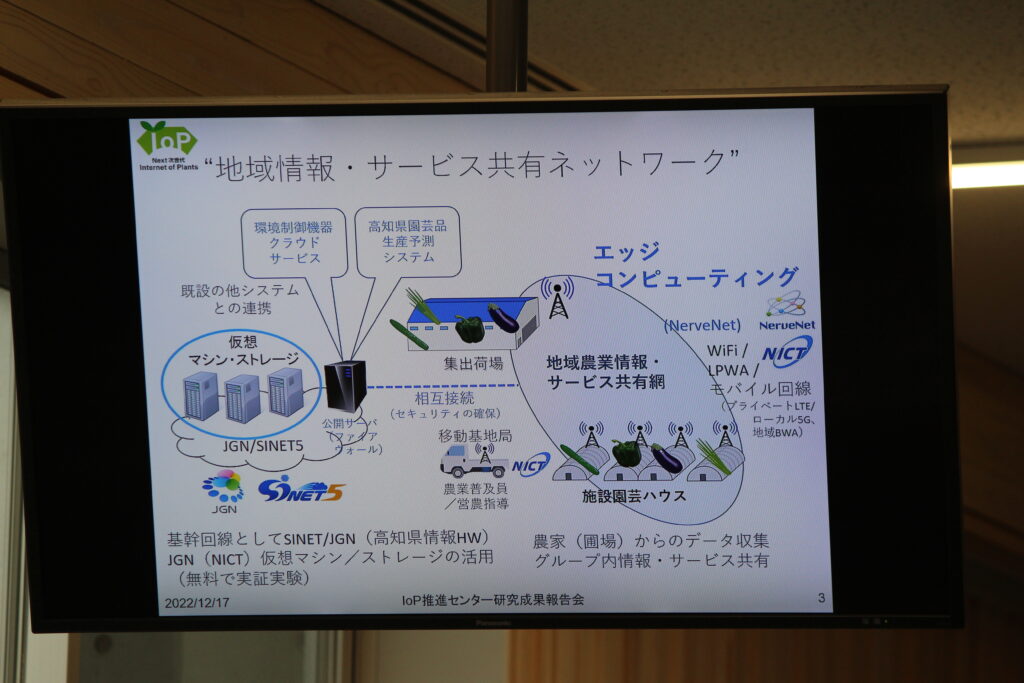
「IoPは、沢山のデータが集まってこそ価値があります。主に利用する農家の方にきちんと参加してもらうために、利用者の負担を軽減しつつ、貴重なデータを安全に保護するための技術開発や実証をしています。
例えば、どれくらいの頻度でデータを集めなければいけないのか、ネットワークは無線がいいのか有線がいいのかなど、地域やグループの狭い範囲でデータを効率よく集める最適な方法の検証に取り組みました。ほかにも、農家向けに運用しているクラウド環境とは別に、研究には研究用の環境を用意して運営上のリスクが分散されるように、ミラーリングしたデータを使えるような技術の支援も行っています。さらに、農業の重要なノウハウに目をつけて、暗号化されたデータを時間をかけてでも解きたい人がいるかもしれません。そのため、暗号化技術だけでなく、必要なデータ以外は別の場所に置き、必要になれば安全かつ高速に復元できる秘密分散法についての研究を行っています。」

取り組みの一つとして、シティネットの尾崎氏から、IoPの研究を下支えするネットワークについての研究の報告がありました。
「IoPの研究を行う圃場と本学をつなぐための無線や、県農業技術センターの圃場のネットワークを構築しました。建屋から各圃場へそれぞれのLANに分けて、どの圃場でも色々な装置を簡便につなげることができます。ネットワーク機器は選定のうえ統一しており、運用のコストを押さえています。
一方で、実際の農家さんでは予算も人も多くありません。中山間部では圃場が散在するため、その一つ一つに有線を引くのはナンセンスです。それを踏まえ、ある無線方式で本学と県農業技術センターの間で通信の確認ができたため、実際の圃場でも検証して利用可能であることを確認しました。
今後は、中山間部でドローンにアンテナを吊るして、どれくらい通信が可能かを検証する実験などを予定しています」


また、Office asoTの松本氏からは、植物の生態、生育状況の可視化について研究の報告がありました。
「これまではナスの生育状況を把握するため、開花数と着果数は人力で数えられていましたが、労力がかかり大変ということで、定点カメラで撮影、送信し、画像からAIでカウントして表示するシステムを開発しました。カメラは耐久性、価格、設置場所や角度、ソフトウェアの選定など多くの課題がありました。AIの機械学習では、教師データとして数千枚の画像それぞれに実や花を示す枠をつける必要があり大変でした。現在、出来上がった可視化ツールはSAWACHIに実装しており、安芸、野市の3軒の農家さんで使っていただいて好評を得ています。」

現場の機器に負荷をかけずにデータの安全を保障する情報セキュリティ認証
清水明宏(学長特別補佐:新学群・IoP担当、情報学群 教授)
清水教授からは、高速で安全かつ低負荷でデータの暗号化を行う情報セキュリティついての研究の報告がありました。
「IoPでは、インターネット経由で温度、湿度、日照など施設の機器から色々な情報が集まり、これら作物の生育に関する情報や大事なノウハウを盗まれないようにするためにも、機器の認証を正しく行う必要があります。一方で、現場の機器の性能が高いとは限らないので、認証のための負荷をできる限り小さくすることも求められます。
以前私が開発したSAS-2という認証方式は、認証のための計算回数が少なく、その速さは世界最高峰です。これより早いものが作れないかを考えたのがSAS-L2であり、おそらくこれ以上早いものは、誰も作れない方式です。本研究においては、これを色々なセンサーネットワークで安全に構成できるセキュリティを開発し、IoPの環境に寄与できる方式として有効性を示すことができました。」

農作物の成長量を適切に把握するためのハウス内の光環境計測
八田章光(システム工学群 教授)
田上周路(システム工学群 准教授)
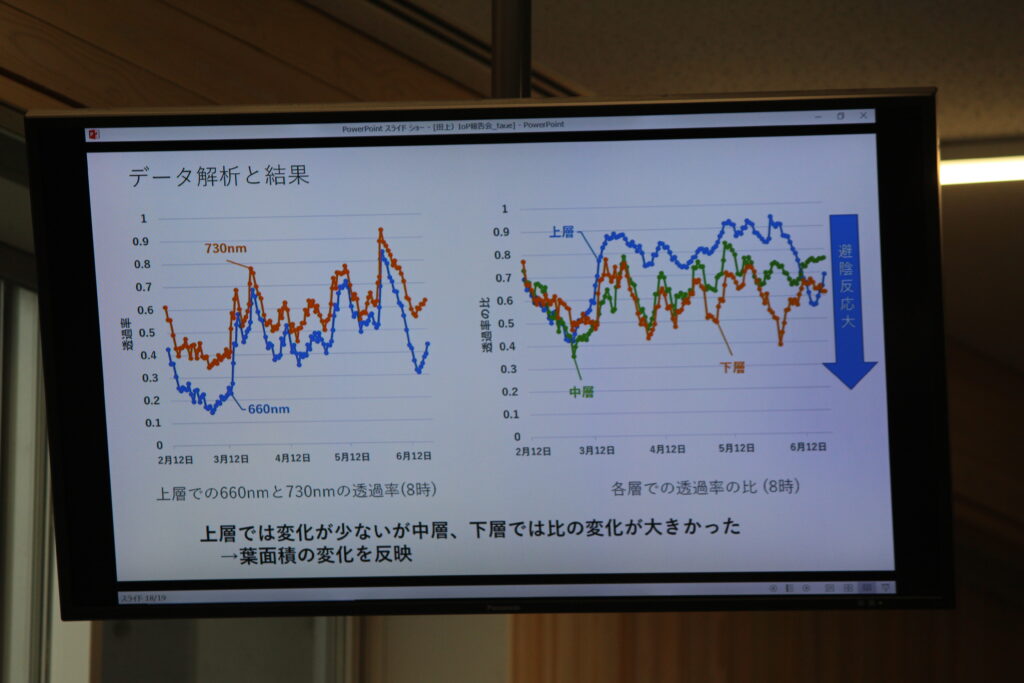
田上教授からは、小型分光器を用いて波長ごとの光環境の測定、光環境情報と植物の情報の関連について研究した報告がありました。
「光環境を測定する装置を用いて施設園芸ハウスの中をターゲットに、太陽光がどんなスペクトルを持つのか(どんな波長の光が混ざり合っているのか)、どの波長が利用されているのかを調べるための測定を行いました。PPFD値(光合成に作用する波長域の光の量)やSPAD値(葉緑素にどれくらい光が吸収されているのか)を測定する装置はすでにありますが、現場で普及するような価格帯ではありません。そこで、安価な小型分光器での複数点での測定値から、PPFD値やSPAD値を推定する方法を考案し、精度の検証を行いました。結果、PPFD値、SPAD値ともに良い精度で測れていることや、薄曇り時の精度向上などこの測定方法の特有の長所も示唆されました。
装置を開発するのではなく、小型分光器でのシステマティックな測定により、大元の分光情報をビッグデータとして持っておくことで、植物体への影響についていろいろな解析の可能性が拡がります。」

農作物の生育予測における深層学習の応用
吉田真一(情報学群 教授)農作物 深層学習 ディープラーニング
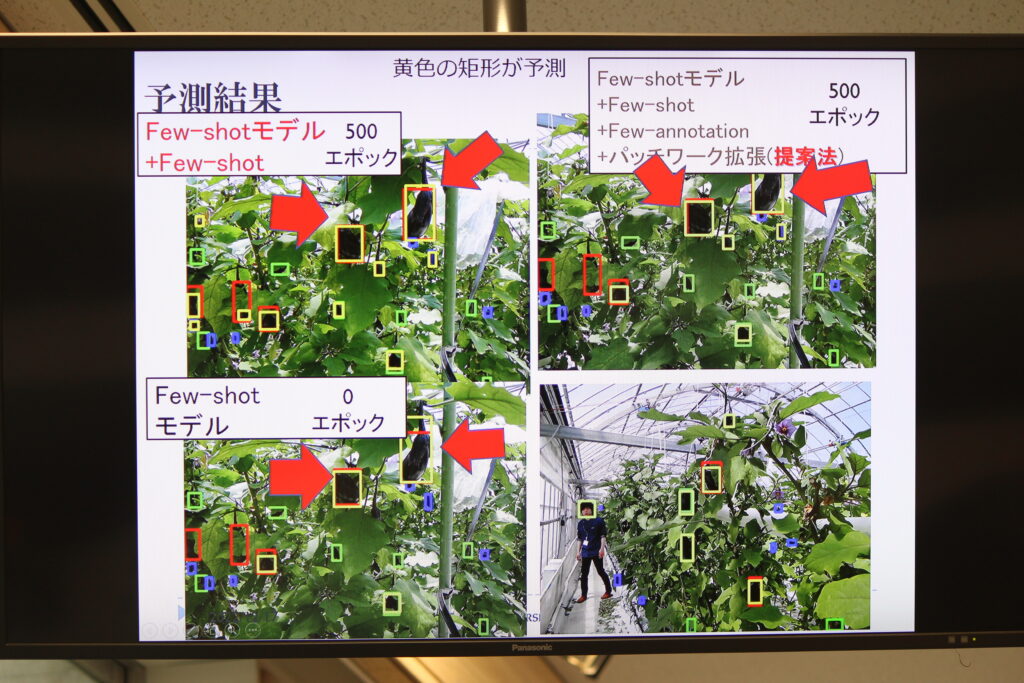
吉田教授からは、画像認識を利用した生育情報の推定について、ナスとユズを対象にした研究内容の報告がありました。
「ナスやユズの木の画像からその実や葉の量を推定するとき、ある程度正確に予測するためには大量の学習用の画像を用意する必要がありますが、どの部分が実であるかの印付けなど大変手間がかかります。そのため、少ないデータから効率よく学習用の画像を作ることを目指しました。
ナスでは類似性をポイントに画像を生成するフューショットラーニングや、擬似的データを作り込む水増し法データ拡張を活用した新しいパッチワーク画像生成法を開発し、作業量を20分の1に減らすことができました。
ユズの画像生成では敵対的生成ネットワーク(画像を生成するAIと、生成された画像か現実の画像かを判別するAIを競わせて学習を行う方法)を用いました。労力の削減の他にもメリットがあり、今回の手法で生成した画像を学習させた結果、1%から2%の精度向上が見られました。この点については引き続いて研究を行っています。
また、NECソリューションイノベータと県農業技術センター果樹試験場とともにLAI(葉面積指数)の研究を行いました。ユズの葉の表面積と葉の枚数が正確に測れてLAIが分かると、どれくらい剪定すれば良いのか判断する目安になります。簡易に画像で確認できないかと考え、スマートフォンを使って樹体の下から魚眼レンズで葉を撮影し、葉の透けた空の部分や光の明暗差でLAIの推定を行いました。現在、アプリとして公開するところまで来ています。」

画像解析による果実の自動検出と収量予測への展開
栗原徹(情報学群 教授)
栗原教授からは、ハイパースペクトラルカメラやサーモカメラを利用した画像認識を活用した研究の報告がありました。
「ピーマンの果実は、緑の中だと非常に見つけにくく、画像を拡大しても判別が難しいことが分かります。そこで、光のスペクトルに着目して研究を行いました。ハイパースペクトルカメラのデータから、肉眼を超えた緑色の区別によってピーマンを識別するフィルターを設計し、従来のカメラと比べて画像認識の性能が向上することを確認しました。
サーモカメラを用いた画像認識では、夜間撮影を実施しました。夜にナスを撮影すると昼間に蓄えた熱で実が白く映る一方、葉は蒸散によって温度が下がり暗くなっています。また、ユズが成熟していない緑色の7月8月にドローンで撮影すると、果実は温度が下がらないためびっくりするほど認識できました。今後、熱画像とカラー画像を同時に使う認識方法を、確実な成果として発表できるように進めています。
また、北川村、高知大学と共同で社会実装に向けた取り組みも進めています。ユズは、高知県の特産品で全国シェア50%を超えています。ユズの果実が緑の時期に収穫量を予測できると、予約販売が可能になり取り引きが有利になります。ユズは豊作と不作を繰り返しやすい作物であり、果実が多すぎると翌年は木が疲れて実がつかなくなるため、葉果比を適正に保つことが重要です。研究成果を用いれば、カメラを背負いながら圃場を歩き回って撮影した3次元の点群データから、果実、葉数、葉果比を推定することができます。興味がある企業と一緒に進めていけたらと考えています。
数年で一定の成果を得られるようになってきましたので、学生達と社会実装に向けて頑張ります」

収穫ロボット開発のための画像認識と駆動制御
岡宏一(システム工学群 教授)
大学2年生修士の永瀬さんより、研究室の取り組みとして4件の研究報告がありました。
「1つ目は、植物体の温度変化に着目した、遠赤外線カメラによる冬季のピーマンの果実の識別方法を研究です。まず、日中のハウスの温度、湿度、照度、紫外線強度などから、そのときの果実の温度範囲を、段階的な機械学習によって絞り込んでいきました。また、夜間はボイラーの稼働による温度変化の特徴をカギに識別することができます。
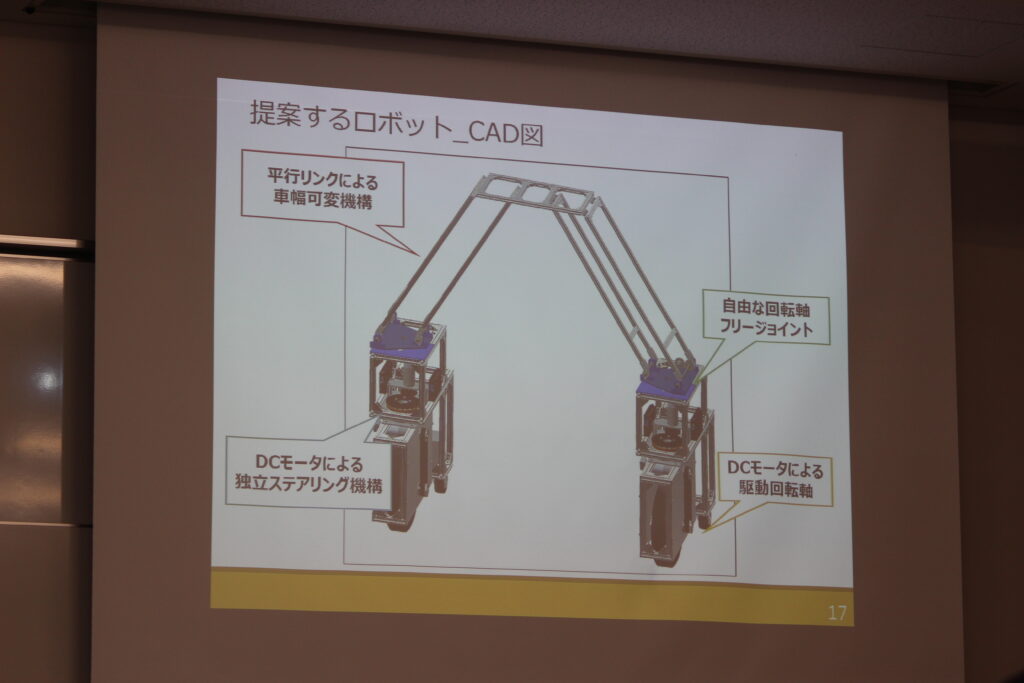
2つ目は、ニラ農家でアルバイトした実体験が開発のきっかけになった、農作業の移動ロボットです。農家では作業時に大きな台車を使っていましたが、自動化するとともに旋回時の大きな面積を解決したいと考え、車幅の変更や旋回手法の検討、ハウスの環境が変わっても利用できる動力の開発に取り組み、狭い範囲でも畳みながら旋回するロボットを設計しました。今後、ロボットが農場に対する地図を作成し、自動で運転するような実験を行っていきます。
3つ目は、収穫する際のロボットアームについての研究です。工場などで部品を移動させるために使われているもので、複数の機構を平行に制御して作用点を変えられるアームロボットを応用しました。通常は、アームは真下に伸ばして水平移動させるように使われますが、収穫のためには横に伸ばすようなメカニズムが必要です。問題は重力によるアームのたわみで、リンクの配置を変えて何パターンも確認しました。今後は、より誤差を小さくするため材質を剛性の高いものに変更し、カメラを利用して目標となるピーマンに向かって移動させる制御などの改善を行います。
最後は、バネを用いて、回転と自由な関節、軽量化した構造を目指したハンドの開発です。農業の現場では、ピーマンなどの果実は、葉で隠れるもの、傾いて育つものもあります。ロボットにおいて、アームの直進の動作のみでは茎や葉が障害になり収穫できない場合があるため、ワイヤー駆動を検討しました。ハンドには歯車がついており、機構全体が回転することでピーマンが傾いて育ってもその茎に沿わせて切ることができます。目標は、葉があってもきちんと果実を切断して摘み取ることができるようにすることです。」
農作業の省力化を実現する作業支援ロボットの開発
王碩玉(システム工学群 教授)
王教授からは、ニラの根本の袴(はかま)や土などを除去するロボットと花卉定植ロボットの研究報告がありました。
「少子高齢化問題に対して危機感を持っており、省力化、効率化を支援するロボットが必要だと考えています。もとより私は、工科大に来てから地元企業や高知大学医学部と健康状態の維持や増進をするロボットなどを開発していました。農業白書によると、農業従事者はわずか15年間で39%減り高齢化も進んでいるということで、IoPの取り組みとして農作業の省力化のための支援ロボットの開発を行っています。
まず、高知県はニラの一大産地で出荷は日本一です。ニラを出荷するまでの工程では、いらない葉や枯れたものを手作業で除去してニラをキレイにする「そぐり」が大変手間の掛かる作業です。今回完成したシステムは、ベルトコンベアにニラを並べると、風圧洗浄でのそぐり、画像認識による異物確認や出荷の可否判定、コンテナへの分別までを行うものです。3年半にわたって、実際の現場で改良を重ねながら開発しました。
また、花卉の定植ロボットは、苗を一個ずつ取り出して土に植える作業をします。カメラからの画像情報により距離を計測しながら畝(うね)に沿って自走し、全自動で苗の取り出しから植え付けまでを行います。
この2つの研究は、農家のニーズから開発に至ったロボットです。それぞれ、農家で実験を行いながら改良を行ってきました。IoPプロジェクトのもと、県や国から支援をいただきながら、非常に恵まれた研究をすることができました。」


報告会の最後に、閉会の挨拶として高知工科大学の礒部学長より、プロジェクトの振り返りや今後の抱負について話がありました。
「このIoPが始まった当初、高知工科大学の殆どの研究者は、農業について本格的に勉強したことがありませんでしたが、農業関係の方々や研究者の方々にご意見を頂きながら研究を行い、本日報告した研究成果を上げることができました。外部の方の目も交えることで、今までにない発想や提案が出来たと思います。中には部分的に使えるものもありますが、まだ未完成が多く、完成させるにはなかなか難しい。いろいろな情報交換、共同研究を通じて完成の域にもっていきたいと考えています。」